CUDA Programming Applications
کاربردهای برنامه نویسی کوداCUDA Programming Applications
کاربردهای برنامه نویسی کودا
Moments and Moment Invariants in Pattern Recognition
این کتاب اشاره ای بر مباحث پیش پردازش تصویر جهت امر بینایی ماشین داشته و سپس به بررسی الگوریتمهایی در زمینه بینایی ماشین پرداخته است، و در 9 فصل توسط آقایان Jan Flusser و Tomáš Suk و خانم Barbara Zitová اعضای گروه کامپیوتر دانشگاه www.avcr.cz جمهوری چک در سال 2009 به چاپ رسید.
دستورات cudaThreadSynchronize و cudaDeviceSynchronize
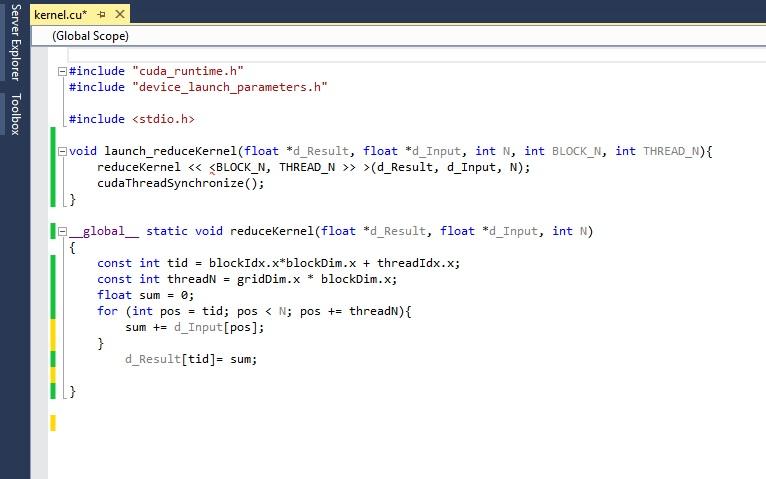
با استفاده از این دستور به استفاده بهینه تری از حافظه و همچنین کاهش مصرف زمان پردازش دست می یابیم،نتیجه 6 آزمونی که برای جمع دوبردار با 8192 عنصر اجرا شد با استفاده از این دستور و همچنین بدون استفاده از آن در جدول زیر آمده است.
| شماره آزمون | با استفاده از دستورcudaDeviceSynchronize | بدون استفاده از دستور cudaDeviceSynchronize |
| 1 | 2479028microsecond | 2486615microsecond |
| 2 | 2503691microsecond | 2573641microsecond |
| 3 | 2576774microsecond | 2570786microsecond |
| 4 | 2470012microsecond | 2629837microsecond |
| 5 | 2571920microsecond | 2710080microsecond |
| 6 | 2495909microsecond | 2618598microsecond |
پایگاه داده AT&T
یک پایگاه داده نسبتا خوب که مربوط به دانشگاه کمبریج شامل چندین تصویر چهره گرفته شده مابین سالهای 1992 تا 1994 می باشد که برای هر تصویر چهره فولدری شامل 10 تصویر در حالات مختلف از آن چهره وجود دارد.
http://www.cl.cam.ac.uk/research/dtg/attarchive/facedatabase.html
تاریخچه ایده Histogram Oriented Gradient(HOG)
HOG یک توصیفگر ویژگی استفاده شده در پردازش تصویر و بینایی ماشین با هدف تشخیص شی و یک روش شمارش رویدادهای جهت گیری گرادیان در قسمت های محلی یک تصویر است، این روش مشابه دیگر توصیفگرها از قبیل هیستوگرام جهت دار لبهEOH و SIFT ومفهوم شکل و ... است اما از لحاظ محاسبات تفاوتهایی دارد.
HOG توسط Robert K. McConnell در سال 1986 میلادی معرفی و در سال 1994 توسط Mitsubishi Electric Research Laboratories مورد استفاده قرار گرفت. بهرحال استفاده از این روش درسال 2005 گسترده تر شد، محققان موسسه IRINA کار تکمیلی خود را در این زمینه در کنفرانس بینایی ماشین و الگوی تشخیص CVPR نشان دادند ، در این کار آنها بر روی تصویر عابر پیاده در تصاویر ثابت تمرکز کردند اگرچه آنها از آن به بعد کارشان را بر روی تصاویر ویدیویی متحرک و همچنین برای حیوانات و وسایل نقلیه در تصاویر ثابت نیز بسط دادند.
ایده اصلی پشت این روش نمایش اشیاء محلی و اشکال درون تصویر هستند که می توانند توسط توزیع گرادیان، شدت و جهت لبه را توصیف کنندکه عکس به دو ناحیه مرتبط کوچک تقسیم می شود که سلول نام دارد و برای هر پیکسل درون سلول هیستوگرام جهت گرادیان جمع آوری شده توسط توصیفگر بهم پیوند زده می شود. برای بهبود دقت، هیستوگرام محلی می تواند با محاسبه معیار شدت در سراسر یک ناحیه بزرگتر از تصویر ، کنتراست آن را نرمال کند، به آن ناحیه بلاک گفته می شود و سپس با استفاده از این مقدار تمامی سلولهای درون بلاک نرمال می شوند، این نرمال سازی بهتر از تغییر روشنایی و سایه زدن است.
HOG مزیتهای کلیدی تری نسبت به سایر توصیفگرها دارد ،از آنجایی که روی سلولهای محلی اعمال می شود تغییرات هندسی و فتومتریک را به جز چرخش اشیا برای آن غیر ممکن می سازد از قبیل تغییراتی که با تغییر مقیاس بزرگتر ظاهر می شود